Banjir merupakan bencana hidrometeorologi yang
paling sering melanda Indonesia, menimbulkan dampak merusak yang signifikan,
terutama di kawasan pemukiman padat penduduk. Frekuensi dan intensitas kejadian
banjir diperkirakan akan semakin meningkat akibat kombinasi faktor perubahan
iklim, degradasi lingkungan (seperti penggundulan hutan dan penyempitan daerah
resapan), serta pesatnya urbanisasi yang seringkali kurang memperhatikan tata
ruang dan drainase berkelanjutan.
Pemukiman penduduk, sebagai pusat aktivitas
kehidupan masyarakat, menjadi area yang paling rentan. Kerusakan infrastruktur
rumah tinggal, fasilitas umum (sekolah, puskesmas), gangguan akses
transportasi, kontaminasi sumber air bersih, hingga ancaman terhadap
keselamatan jiwa dan harta benda warga merupakan konsekuensi langsung yang
sering terjadi.
Sistem peringatan dini konvensional yang ada
seringkali memiliki keterbatasan, seperti informasi yang kurang akurat, tidak
tepat waktu, atau tidak menjangkau seluruh lapisan masyarakat secara efektif,
sehingga waktu berharga untuk evakuasi dan mitigasi menjadi terbuang. Oleh
karena itu, pengembangan dan implementasi Sistem Peringatan dan
Penanganan Dini Banjir yang terintegrasi, real-time, dan berbasis komunitas di
kawasan pemukiman menjadi suatu keharusan dan kebutuhan mendesak. Sistem
ini dirancang untuk memberikan informasi ancaman banjir secara lebih cepat,
akurat, dan mudah dipahami, sehingga memungkinkan pemerintah setempat, lembaga
penanggulangan bencana, dan warga masyarakat itu sendiri untuk mengambil
langkah-langkah antisipatif dan penanganan segera guna meminimalkan korban
jiwa, kerugian material, dan mempercepat pemulihan pasca bencana.
PWM (Pulse Width Modulation) adalah salah satu teknik modulasi dengan mengubah lebar pulsa (Duty Cycle) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa merupakan kondisi high kemudian berada di zona transisi ke kondisi low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yangbelumtermodulasi.DutyCycleadalahperbandinganantarawaktuON(lebar pulsaHigh)denganperioda.DutyCyclebiasanyadinyatakandalambentukpersen (%).
Gambar1.DutyCycle
•Duty Cycle=tON/ ttotal
•tON=WaktuONatauWaktudimanategangankeluaranberadapadaposisi tinggi (high atau 1)
•tOFF = Waktu OFF atau Waktu dimana tegangan keluaran berada padaposisi rendah (low atau 0)
•ttotal = Waktu satu siklus atau penjumlahan antara tON dengan tOFF atau disebut juga dengan “periode satu gelombang”
2. ADC (Analog to Digital Converter)
ADC atau Analog to Digital Converter merupakan salah satu perangkat elektronikayangdigunakansebagaipenghubungdalampemrosesansinyalanalog oleh sistem digital. Fungsi utama dari fitur ini adalah mengubah sinyal masukan yangmasihdalambentuksinyalanalogmenjadisinyaldigitaldenganbentukkode- kode digital. Ada 2 faktor yang perlu diperhatikan pada proses kerja ADC yaitu kecepatan sampling dan resolusi.
Kecepatan sampling menyatakan seberapa sering perangkat mampu mengkonversi sinyal analog ke dalam bentuk sinyal digital dalam selang waktu yang tertentu. Biasa dinyatakan dalam sample per second (SPS). Sementara Resolusimenyatakantingkatketelitianyangdimilliki.
3.Mikrokontroler
Mikrokontroler adalah salah satu dari bagian dasar dari suatu sistem komputer.Meskipun mempunyai bentuk yang jauh lebih kecil dari suatu komputer pribadi dankomputer mainframe, mikrokontroler dibangun dari elemen-elemen dasar yang sama.Secara sederhana, komputer akan menghasilkan output yang spesifik berdasarkan inputyangditerimadanprogramyangdikerjakan.Sepertiumumnyakomputer,mikrokontrolersebagaialatyangmengerjakanperintah-perintahyangdiberikankepadanya
a.) Raspberry Pi Pico
Raspberry Pi Pico adalah mikrokontroler berbiaya rendah dan berkinerja tinggi yang dikembangkan oleh Raspberry Pi Foundation. Raspberry Pi Pico bekerja sebagai otak dari sebuah alat elektronik. Saat diberi daya, Pico mulai menjalankan program yang sudah ditanam di dalamnya. Ia bisa membaca data dari berbagai sensor, seperti sensor suhu, air, atau cahaya, melalui pin input yang tersedia. Data dari sensor ini kemudian diproses oleh chip utama di Pico. Setelah diproses, Pico akan memberi perintah ke perangkat lain sesuai program, misalnya menyalakan lampu, buzzer, atau menampilkan informasi di layar. Semua proses ini berjalan berulang-ulang secara otomatis selama alat dinyalakan. Dengan kata lain, Pico membaca data, memikirkan apa yang harus dilakukan, lalu bertindak sesuai perintah program.
b.) STM32
STM32F103C8T6 bekerja sebagai otak dari sistem elektronik dengan mengendalikan dan memproses data dari berbagai input dan output. Mikrokontroler ini berbasis arsitektur ARM Cortex-M3 dan memiliki kecepatan hingga 72 MHz. Prinsip kerjanya dimulai saat daya diberikan, lalu mikrokontroler menjalankan program yang tersimpan di memori flash. Ia membaca data dari sensor melalui pin input (seperti ADC untuk sensor analog), memproses informasi tersebut berdasarkan logika yang diprogram, lalu memberikan perintah ke perangkat output seperti LED, LCD, atau buzzer melalui pin output. Dengan fitur seperti GPIO, ADC, UART, dan timer, STM32F103C8T6 mampu menjalankan berbagai fungsi dalam sistem tertanam secara efisien dan real-time.
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.
Cara kerja komunikasi UART:
Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2mengkonversikandatadanmenghapusbittambahan,kemudianditransfer secara parallel ke data bus penerima.
5. Sensor
Ultasonic Sensor
kami memilih menggunakan ultrasonic sensor HC-SR04 dikarenakan harganya yang lebih terjangkau dan lebih cocok untuk praktek tugas yang sederhana. Ultrasonic sensor nantinya akan mendeteksi ketinggian air di permukaan tanah.
Prinsip kerja sensor ultrasonik didasarkan pada penggunaan gelombang suara frekuensi tinggi (ultrasonik) untuk mengukur jarak suatu objek. Sensor ini memiliki dua komponen utama: transmitter (pemancar) dan receiver (penerima). Transmitter memancarkan gelombang ultrasonik (biasanya sekitar 40 kHz) ke arah objek. Ketika gelombang tersebut mengenai objek, ia akan dipantulkan kembali dan diterima oleh receiver. Mikrokontroler kemudian menghitung waktu yang dibutuhkan sejak gelombang dipancarkan hingga diterima kembali (time of flight). Dengan menggunakan rumus kecepatan suara (jarak = kecepatan × waktu / 2), sensor dapat menghitung jarak antara sensor dan objek secara akurat. Sensor ini banyak digunakan untuk mendeteksi ketinggian air, menghindari rintangan, dan aplikasi pengukuran jarak lainnya.
Rain Sensor
Prinsip kerja rain sensor berbasis jalur tembaga didasarkan pada perubahan konduktivitas listrik akibat kehadiran air hujan pada permukaan sensornya. Sensor ini terdiri dari papan PCB dengan pola jalur tembaga yang saling berdekatan namun tidak terhubung langsung. Saat kondisi kering, tidak ada aliran listrik yang terjadi di antara jalur-jalur tersebut karena tidak adanya medium penghantar. Namun ketika air hujan turun dan membasahi permukaan sensor, air yang termasuk cairan elektrolit akan menghantarkan arus listrik dengan menghubungkan jalur-jalur tembaga. Pada saat inilah terjadi proses elektrolisis, yang memungkinkan arus mengalir karena meningkatnya konduktivitas. Sensor ini memiliki IC komparator yang menghasilkan output berupa sinyal digital (logika HIGH dan LOW) serta sinyal analog sesuai dengan tingkat kelembapan permukaan. Jalur tembaga pada pad sensor bertindak seperti potensiometer, di mana resistansinya bervariasi tergantung jumlah air yang mengenai permukaannya. Semakin banyak air yang terdeteksi, maka konduktivitasnya meningkat dan resistansinya menurun, sedangkan saat sedikit atau tidak ada air, konduktivitas rendah dan resistansinya tinggi. Dengan demikian, sensor ini efektif digunakan untuk memantau kondisi cuaca khususnya mendeteksi adanya hujan di lingkungan luar.
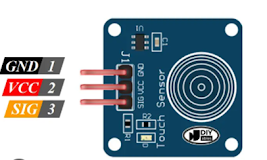
Touch sensor bekerja dengan mendeteksi sentuhan fisik manusia melalui perubahan medan listrik akibat kapasitansi tubuh. Sensor ini biasanya menggunakan prinsip kapasitif, di mana saat tidak ada sentuhan, kapasitansi tetap stabil. Namun, ketika jari manusia menyentuh permukaan sensor, kapasitansi meningkat karena tubuh manusia bersifat konduktif dan mempengaruhi medan listrik di sekitar sensor. Perubahan ini kemudian dikenali oleh sirkuit internal sensor dan diubah menjadi sinyal digital berupa logika HIGH atau LOW yang dikirim ke mikrokontroler. Dalam sistem rangkaian yang kami buat, touch sensor berfungsi sebagai input digital yang berperan sebagai saklar on/off untuk mengaktifkan atau menonaktifkan sistem secara langsung melalui sentuhan pengguna, menggantikan tombol mekanis konvensional.
Motor Servo MG 996 R
Motor servo MG996R adalah motor DC dengan sistem kontrol posisi internal yang menggerakkan porosnya berdasarkan sinyal PWM (Pulse Width Modulation) yang diterima dari mikrokontroler. Servo ini memiliki mekanisme pengukuran posisi berupa potensiometer internal yang memberikan umpan balik ke rangkaian kontrol untuk menjaga posisi poros sesuai dengan lebar pulsa sinyal. Ketika mikrokontroler mengirimkan sinyal PWM dengan durasi tertentu, motor servo akan berputar hingga mencapai sudut yang sesuai dengan durasi pulsa tersebut, biasanya antara 0° hingga 180°. MG996R mampu menghasilkan torsi besar dan gerakan presisi, sehingga banyak digunakan dalam aplikasi kendali posisi mekanik seperti robotik, model RC, dan sistem otomasi.
Dalam proyek “SISTEM PERINGATAN DAN PENANGANAN DINI BANJIR DI PEMUKIMAN,” servo MG996R digunakan sebagai aktuator sistem drainase otomatis. Ketika sensor hujan atau sensor ketinggian air mendeteksi kondisi siaga atau bahaya, mikrokontroler akan mengirimkan sinyal PWM ke motor servo. Motor kemudian akan menggerakkan mekanisme saluran air seperti membuka katup atau mengangkat penutup drainase, sehingga mempercepat pembuangan air dan membantu mencegah terjadinya genangan atau banjir di area pemukiman.
LCD
1.LCD terdiri dari beberapa lapisan utama:
Lapisan backlight (sumber cahaya di belakang layar)
Filter polarisasi depan dan belakang
Lapisan kristal cair (liquid crystal layer)
LCD (Liquid Crystal Display) atau Penampil Kristal Cair adalah perangkat optik elektronik panel datar yang bekerja dengan memanfaatkan sifat modulasi cahaya dari kristal cair. Kristal cair dalam LCD tidak memancarkan cahaya secara langsung, melainkan mengatur sejauh mana cahaya dari lampu latar (backlight) dapat melewati lapisan polarizer dan filter warna di dalam layar. Saat arus listrik dialirkan ke piksel tertentu, orientasi molekul kristal cair berubah, sehingga mengubah polarisasi cahaya yang melintasinya. Perubahan ini memungkinkan atau menghambat cahaya untuk diteruskan ke permukaan layar, membentuk gambar atau karakter. Dengan kombinasi polarizer, elektroda transparan, dan filter warna, LCD mampu menampilkan informasi visual baik dalam format monokrom maupun berwarna. Dalam konteks proyek sistem, LCD berfungsi sebagai penampil data yang dihasilkan oleh sensor, seperti status ketinggian air, intensitas hujan, atau kondisi sistem secara keseluruhan.
Buzzer
Buzzer piezomagnetik adalah komponen elektronika yang menghasilkan suara melalui getaran mekanis akibat efek piezomagnetik, yaitu perubahan bentuk bahan magnetostriktif ketika dialiri arus listrik. Saat diberikan tegangan listrik, medan magnet terbentuk di dalam inti magnetik buzzer, yang menyebabkan pelat logam atau diafragma di dalamnya bergetar secara periodik. Getaran ini kemudian menghasilkan gelombang bunyi yang dapat didengar oleh manusia. Buzzer piezomagnetik bekerja secara efisien dengan frekuensi tetap dan tidak memerlukan rangkaian osilator tambahan. Dalam penggunaannya, seperti pada sistem peringatan banjir, buzzer berfungsi sebagai alarm akustik yang menyala ketika sensor mendeteksi kondisi bahaya, seperti ketinggian air yang melewati ambang batas. Dengan hanya memberikan tegangan input sesuai spesifikasi, buzzer secara otomatis akan menghasilkan suara peringatan yang berguna untuk memperingatkan pengguna secara langsung.
LED
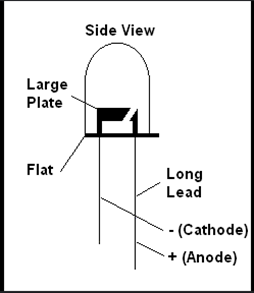
LED (Light Emitting Diode) adalah komponen semikonduktor yang memancarkan cahaya saat dialiri arus listrik dalam kondisi tegangan maju (forward bias). Ketika tegangan diberikan pada kaki anoda dan katoda LED, elektron dari sisi negatif (n-type) berpindah dan berrekombinasi dengan hole di sisi positif (p-type), sehingga melepaskan energi dalam bentuk foton atau cahaya. Warna cahaya yang dihasilkan bergantung pada bahan semikonduktor yang digunakan. Dalam sistem ini, LED digunakan sebagai indikator visual untuk menunjukkan status kondisi yang terdeteksi oleh sensor. LED hijau menandakan kondisi normal (aman), LED kuning atau biru sebagai siaga, dan LED merah sebagai tanda bahaya atau peringatan banjir. Dengan nyala cahaya yang terang dan konsumsi daya rendah, LED sangat efektif untuk memberikan sinyal visual yang mudah dikenali oleh pengguna dalam sistem peringatan dini.
Tegangan Maju (Vf): 2.0 V typical @ 20 mA
Arus Maju (If): 20 mA typical
Tegangan reverse (Vr): 5 V max (tegangan balik harus dihindari)
Panjang gelombang cahaya (λ): sekitar 620–630 nm
Jumper
Jumper adalah konektor kecil yang digunakan untuk menghubungkan dua pin pada papan sirkuit. Fungsi utamanya adalah mengatur konfigurasi, memilih mode kerja, atau menghubungkan komponen tanpa menyolder. Jumper yang digunakan adalah jumper male to male dan jumper male to female.
Resistor
Resistor berfungsi membatasi arus listrik dalam rangkaian. Komponen ini penting untuk mencegah kerusakan pada LED, sensor, atau komponen lain yang sensitif terhadap arus tinggi.
STM32 berfungsi sebagai pengirim data dari sensor ultrasonik HC-SR04.
Raspberry Pi Pico berfungsi sebagai penerima data, pemroses logika status, pengendali LED, buzzer, servo, dan tampilan LCD I2C.
2. Proses di STM32: Membaca Sensor Jarak
STM32 mengontrol sensor ultrasonik HC-SR04:
Mengirim sinyal trigger melalui pin PA5.
Menerima pantulan echo melalui pin PA4.
Menghitung waktu pantulan untuk menentukan jarak objek dalam cm.
Nilai jarak tersebut dikirim melalui UART1 (PA9 - TX, PA10 - RX) ke Raspberry Pi Pico secara berkala setiap 500ms.
3. Proses di Raspberry Pi Pico: Menerima dan Mengolah
Raspberry Pi Pico menggunakan UART1 (GP9 - RX, GP8 - TX) untuk menerima data dari STM32.
Data yang diterima adalah angka jarak dalam cm.
Pico juga bisa menerima data hujan (nilai 0 atau 1) dari STM32 (walau belum tercantum di STM32, diasumsikan sensor hujan akan ditambahkan di sana dan datanya dikirim bersama jarak sebagai format jarak,hujan).
4. Pengolahan Status oleh Raspberry Pi Pico
Raspberry Pi Pico memproses data jarak dan hujan dengan logika sebagai berikut:
Jika hujan tidak turun (0) dan jarak < 25 cm → Status: Bahaya
Jika jarak > 100 cm dan hujan turun (1) → Status: Aman
Jika jarak >= 25 cm atau hujan tidak turun → Status: Siaga
Jika semua kondisi gagal → default Status: Bahaya
5. Tindakan Berdasarkan Status
Setelah status ditentukan, Pico akan:
Mengaktifkan LED indikator:
Merah: Bahaya
Biru: Siaga
Hijau: Aman
Mengontrol buzzer:
Aktif hanya saat status Bahaya
Menggerakkan servo motor:
Sudut 90° saat Bahaya (misalnya menutup pintu/katup)
Sudut 0° saat Siaga atau Aman
Menampilkan informasi jarak dan status ke LCD I2C 20x4

















Tidak ada komentar:
Posting Komentar